專利申請號:201921080198.3

采用常導吸引型磁懸浮(EMS)列車模型,實驗著重定量測量磁懸浮平衡時的相關物理量;研究磁懸浮實現的控制方式。
實驗內容
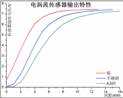
(1)電渦流位移傳感器的輸出特性測試: ● 測試不同材料的距離特性,研究被測物的材料對輸出特性的影響;
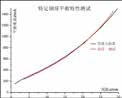
(2)鋼球平衡特性測試: ● 測試不同鋼球穩定懸浮時電流 i 和間隙 x 的關系,研究磁力、電流、間隙的關系;
(3)PID 控制特性測試: ● 獨立改變 PID 參數,通過示波器觀察階躍激勵下傳感器響應曲線,了解 PID 各參數的作用;
(4)懸浮高度自動控制演示: ● 通過改變控制儀傳感器設定值 Vset,實現穩定懸浮下,鋼球到傳感器間距的自動調整;
(5)異型物體懸浮演示: ● 實現導磁圓環、導磁螺釘的穩定懸浮。
產品特點
(1)現有物理教學中少有關于磁力的計算教學,本實驗除介紹常見的磁路法,更給學生介紹一種通用、準確的使用有限元法進行磁力分析的數值求解思路;
(2)在懸浮狀態下研究力與勵磁電流的關系,集趣味性和知識性于一體;
(3)通過物理力學模型介紹 PID 控制,配合參數開放的、快速響應的 PID 控制平臺。從理論和操作兩個方面,使學生學習自動控制中最常見的 PID 控制。
知識點
磁力計算、磁路分析、有限元仿真、磁懸浮、PID 控制、電渦流位移傳感器
型號及配套




